
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Lar
>
Produtos > Motor de passo de circuito fechado > Motor de passo de circuito fechado trifásico > Motor de passo de circuito fechado Nema42 trifásico série 110
Produtos
- Servo motor CA
- Servomotor CC
- Motor de passo de circuito fechado
- Motor de passo Hybird
- Driver de motor de passo Hybird
- Driver de motor de passo de circuito fechado
- Driver de servo motor CA
- Motor de passo integrado
- Driver de servomotor CC
- Motor de parafuso
- Driver de passo tipo barramento RS485 ou CAN ou Ethercat
- Redutor Planetário
- Controlador CLP
- Tela de toque IHM
- Kit de driver de servo motor Ethercat AC
- Kit de driver de servo motor AC A8
- Servo Motor Integrado
Novos Produtos
 Lichuan AC Servo Motor Drivers Kit A8 Alta Precisão STO ABZ 1001W 1KW 4.0N.m 220V 4.6A 2500/3000RPM IP65
Lichuan AC Servo Motor Drivers Kit A8 Alta Precisão STO ABZ 1001W 1KW 4.0N.m 220V 4.6A 2500/3000RPM IP65 Lichuan AC Servo Motor Drivers Kit A8 Alta Precisão STO ABZ 1000W 1KW 3.2N.m 220V 5.8A 2500/3000RPM IP65
Lichuan AC Servo Motor Drivers Kit A8 Alta Precisão STO ABZ 1000W 1KW 3.2N.m 220V 5.8A 2500/3000RPM IP65 Kit de drivers de servo motor AC Lichuan A8 de alta precisão STO ABZ 750W 0,75KW 2,39N.m 220V 4,5A 2500/3000RPM IP65
Kit de drivers de servo motor AC Lichuan A8 de alta precisão STO ABZ 750W 0,75KW 2,39N.m 220V 4,5A 2500/3000RPM IP65 Kit de drivers de servo motor AC Lichuan A8 de alta precisão STO ABZ 600W 1.91N.m 220V 3.3A 3000RPM IP65
Kit de drivers de servo motor AC Lichuan A8 de alta precisão STO ABZ 600W 1.91N.m 220V 3.3A 3000RPM IP65- Todos os novos produtos

Motor de passo de circuito fechado Nema42 trifásico série 110
LICHUAN® é um fabricante profissional de motor de passo de circuito fechado Nema42 trifásico da China Série 110 com alta qualidade e preço razoável. Bem-vindo a entrar em contato conosco.
Enviar consulta
Descrição do produto
O motor de passo de circuito fechado Nema42 trifásico série 110 de alta qualidade é oferecido pelo fabricante chinês LICHUAN®. Compre motor de passo de circuito fechado Nema42 trifásico série 110, que é de alta qualidade diretamente com preço baixo.
Motor de passo de circuito fechado Nema42 trifásico série 110, o uso de matérias-primas de alta qualidade e aço silício de ímã permanente de alto padrão, com codificador de alta precisão de 1000 linhas, supera completamente os problemas de passo do motor de passo de circuito aberto, enquanto melhora significativamente o desempenho de alta velocidade do motor, para facilitar a atualização tradicional do programa de acionamento passo a passo, redução de custos em comparação com o servo motor para reduzir mais de 50%. Comprimento do motor 161 mm ~ 219 mm, faixa de torque: 12N.m ~ 20N.m, diâmetro do eixo do motor 19mm. O motor de passo de circuito fechado Nema42 trifásico da série 110 pode ser compatível com driver de 3 tipos: RS485. Drivers de controle Canopen.Pulse.
Parâmetros de desempenho elétrico
| Item | Especificações |
| Precisão do ângulo do passo | ±5% (etapa completa) |
| Precisão da Resistência | ±10%(20℃) |
| Precisão da indutância | ±20%(1KHZ) |
| Aumento de temperatura | 80°℃ máx. (corrente nominal, 2 fases de ligação) |
| Temperatura ambiente | -20℃~* 50℃ |
| Resistência de isolamento | 100 MQMin 500 VCC |
| Rigidez dielétrica | 500 V CA 1 minuto |
| Carga radial permitida | 0,02 mm Máx. (450g de carga) |
| Carga de Impulso Permitida | 0,08 mm Máx. (450g de carga) |
| Carga máx. radial | 220N (20 mm da superfície do flange) |
| Carga Máxima do Eixo | 60N |
| Serles | Etapa Ângulo(") |
Comprimento (mm) | Retenção Torque (N.m) | Estágio Atual (A) |
Rotacional Inércia (g.cm²) |
Estágio Resistência (Q) |
Estágio Indutância (mH) |
Final de partida motorista |
Liderar fio (Não.) |
Peso (kg) |
| LC110H3151 | 1.2 | 161 | 12 | 6.0 | 9720 | 1.89 | 8.34 | LCDA2260E | 3 | 6.6 |
| LC110H3185 | 1.2 | 185 | 16 | 6.4 | 13560 | 1.89 | 8.73 | LCDA2260E | 3 | 9.0 |
| LC110H3219 | 1.2 | 219 | 20 | 6.9 | 17400 | 1.859 | 7.26 | LCDA2260E | 3 | 11.1 |
Acima estão produtos representativos. Os produtos podem ser personalizados!
Forma e tamanho de instalação (unidade:mm)
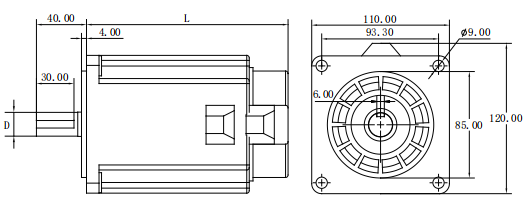
Modo de eixo do motor
| Modelo | Haste Diâmetro (mm) |
Haste Extensão (mm) |
Eixo Comprimento (mm) |
| LC110H3151 | f19 | Chaveta 6x 30 | 40 |
| LC110H3185 | f19 | Chaveta 6x 30 | 40 |
| LC110H3219 | f19 | Chaveta 6x 30 | 40 |
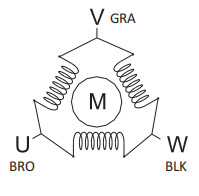
Diagrama de fiação do motor
Cores dos fios do motor
Definições de codificador Cores de chumbo
| 1 | amarelo | BE+ |
| 2 | verde | EB- |
| 3 | preto | EA+ |
| 4 | azul | EA- |
| 5 | Vermelho | +5VCC |
| 6 | Branco | EGND |
Notas
1. As fases devem ser conectadas corretamente ao conectar o motor e o driver.
2. A geração óbvia de calor do motor pode ocorrer sob
diferentes condições de condução. Temperatura da superfície de
o motor pode exceder 85°C durante a operação.
3. O motor deve ser posicionado pelo encaixe de instalação no
tampa frontal do motor, atenção deve ser dada ao erro
correspondência e a concentricidade entre o eixo do motor
e a carga devem ser controladas rigorosamente. O motor de passo de loop pode ser compatível com driver de 3 tipos: RS485. Drivers de controle Canopen.Pulse.
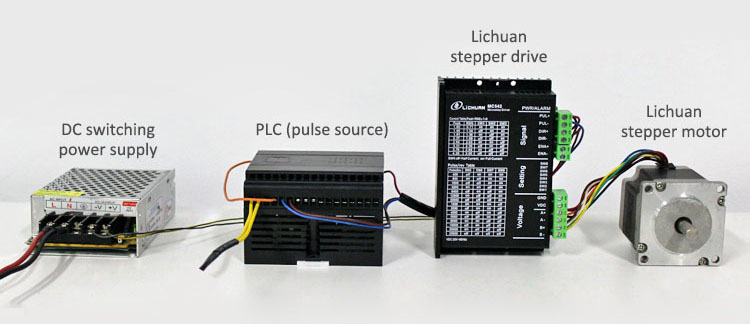
Diagrama de fiação do aplicativo
Um sistema completo de controle de motor de passo deve incluir o produto mostrado abaixo
Embalagem do produto

Máquina de produtos de produção de fábrica de Lichuan
-

Máquina de escultura -

Equipamento de revestimento -

Máquina de marcação de fibra de última geração -

Máquina de parafusar -

Máquina de teste -

Impressora UV
-

Máquina de solda automática -

Segurando a máquina de teste de torque -

Máquina de parafuso -

Máquina oscilográfica
Aplicações Industriais
-

Braço robótico -

Máquina de corte a laser
-

impressao 3D -

Máquina cnc -

Asserção Automática -

Máquina de gravação
Hot Tags: Motor de passo de circuito fechado Nema42 trifásico série 110, China, fabricantes, fornecedores, fábrica, personalizado, feito na China, barato, CE, durável, qualidade
Categoria Relacionada
Enviar consulta
Por favor, sinta-se livre para dar o seu inquérito no formulário abaixo. Responderemos em 24 horas.




