
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Um artigo para entender a diferença entre motores de passo e servos e servomotores
I. Diferenças entre motores de passo e servos e servomotores
Motor de passo: é o sinal de pulso elétrico em deslocamento angular ou deslocamento de linha das peças do motor de passo do elemento de controle de malha aberta. Simplificando, ele depende do sinal de pulso elétrico para controlar o ângulo e o número de voltas. Então ele confia apenas no sinal de pulso para determinar quanta rotação. Como não há sensor, o ângulo de parada pode divergir. No entanto, o sinal de pulso preciso minimiza o desvio.
Servo motor: conte com o circuito de servo controle para controlar a velocidade do motor, através do sensor para controlar a posição de rotação. Portanto, o controle de posição é muito preciso. E a velocidade de rotação também é variável.
Servo (Servo Eletrônico): O principal componente do servo é o servo motor. Contém circuito de controle do servo motor + conjunto de engrenagens de redução. Ah, sim, o servo motor não possui conjunto de engrenagem de redução. E o servo possui um conjunto de engrenagens de redução.
No caso de um servo limite, ele conta com um potenciômetro sob o eixo de saída para determinar o ângulo de direção do braço do leme. O controle do sinal servo é um sinal modulado por largura de pulso (PWM), onde um microcontrolador pode facilmente gerar este sinal.
II. Princípio básico do motor de passo
Como funciona:
Normalmente, o rotor de um motor é um ímã permanente e, quando a corrente flui através dos enrolamentos do estator, os enrolamentos do estator produzem um campo magnético vetorial. Este campo magnético fará com que o rotor gire em um ângulo, de modo que a direção do par de campos magnéticos do rotor seja igual à direção do campo magnético do estator. Quando o campo magnético vetorial do estator gira em um ângulo. O rotor também gira em um ângulo com este campo magnético. Para cada pulso elétrico de entrada, o motor gira um passo angular para frente. Seu deslocamento angular de saída é proporcional ao número de pulsos de entrada e sua velocidade de rotação é proporcional à frequência dos pulsos. Ao alterar a ordem em que os enrolamentos são energizados, o motor inverte. Portanto, o número e a frequência dos pulsos e a ordem de energização dos enrolamentos de cada fase do motor podem ser controlados para controlar a rotação do motor de passo.
Princípio da geração de calor:
Normalmente vemos todos os tipos de motores, os internos são núcleo de ferro e bobina de enrolamento. A resistência do enrolamento, a energia produzirá perda, o tamanho da perda e a resistência e a corrente são proporcionais ao quadrado, o que é frequentemente referido como perda de cobre, se a corrente não for o padrão DC ou onda senoidal, também produzirá perda harmônica; núcleo tem efeito de corrente parasita de histerese, no campo magnético alternado também produzirá perda, o tamanho do material, corrente, frequência, tensão relacionada, que é chamada de perda de ferro. A perda de cobre e a perda de ferro se manifestarão na forma de geração de calor, afetando assim a eficiência do motor. O motor de passo geralmente busca precisão de posicionamento e saída de torque, a eficiência é relativamente baixa, a corrente é geralmente maior e os componentes harmônicos são altos, a frequência da corrente alternando com a velocidade e mudança, então os motores de passo geralmente têm uma situação de calor, e a situação é mais séria do que o motor CA geral.
III. Construção do leme
O servo é composto principalmente por uma carcaça, uma placa de circuito, um motor de acionamento, um redutor e um elemento de detecção de posição. Seu princípio de funcionamento é que o receptor envia um sinal para o servo, e o IC na placa de circuito aciona o motor sem núcleo para começar a girar, e a energia é transmitida ao braço oscilante através da engrenagem de redução e, ao mesmo tempo, o detector de posição envia um sinal de volta para determinar se chegou ao posicionamento ou não. O detector de posição é na verdade um resistor variável. Quando o servo gira, o valor do resistor mudará de acordo, e o ângulo de rotação pode ser conhecido detectando o valor do resistor. Servo motor geral é um fio de cobre fino enrolado em um rotor de três pólos, quando a corrente flui através da bobina irá gerar um campo magnético, e a periferia do ímã do rotor para produzir repulsão, que por sua vez gera a força de rotação. Segundo a física, o momento de inércia de um objeto é diretamente proporcional à sua massa, portanto, quanto maior a massa do objeto a ser girado, maior será a força necessária. Para atingir velocidade de rotação rápida e baixo consumo de energia, o servo é feito de finos fios de cobre torcidos em um cilindro oco muito fino, formando um rotor oco muito leve e sem pólos, e ímãs são colocados dentro do cilindro, que é o motor de copo oco.
Para se adequar a diferentes ambientes de trabalho, existem servos com designs à prova d'água e à prova de poeira; e em resposta aos diferentes requisitos de carga, existem engrenagens de plástico e metal para servos, e engrenagens de metal para servos são geralmente de alto torque e alta velocidade, com a vantagem de que as engrenagens não serão lascadas devido a cargas excessivas. Servos de nível superior serão equipados com rolamentos de esferas para tornar a rotação mais rápida e precisa. Há uma diferença entre um rolamento de esferas e dois rolamentos de esferas, é claro que os dois rolamentos de esferas são melhores. Os novos servos FET usam principalmente FET (Field Effect Transistor), que tem a vantagem de baixa resistência interna e, portanto, menos perda de corrente do que os transistores normais.
4. Princípio servo de operação
Da onda pwm para o circuito interno para gerar uma tensão de polarização, o gerador do contator através da engrenagem de redução para acionar o potenciômetro para se mover, de modo que quando a diferença de tensão for zero, o motor pare, de modo a obter o efeito de servo.
Os protocolos para servo PWMs são todos iguais, mas os servos mais recentes a aparecer podem ser diferentes.
O protocolo é geralmente: largura de alto nível em 0,5ms ~ 2,5ms para controlar o servo para girar em diferentes ângulos.
V. Como funcionam os servomotores
A figura abaixo mostra um circuito de controle de servo motor feito com um amplificador operacional de potência LM675, e o motor é um servo motor DC. Como pode ser visto na figura, o amplificador operacional de potência LM675 é alimentado por 15V, e a tensão de 15V é adicionada à entrada em fase do amplificador operacional LM675 através de RP 1, e a tensão de saída do LM675 é adicionada à entrada do servo motor. O motor está equipado com um gerador de sinais de medição de velocidade para detecção em tempo real da velocidade do motor. Na verdade, o gerador de sinal de velocidade é uma espécie de gerador e sua tensão de saída é proporcional à velocidade de rotação. A saída de tensão do gerador de sinal de medição de velocidade G é realimentada para a entrada inversora do amplificador operacional como um sinal de erro de velocidade após um circuito divisor de tensão. O valor da tensão definido pelo potenciômetro de comando de velocidade RP1 é adicionado à entrada em fase do amplificador operacional após a divisão da tensão por R1.R2, que equivale à tensão de referência.
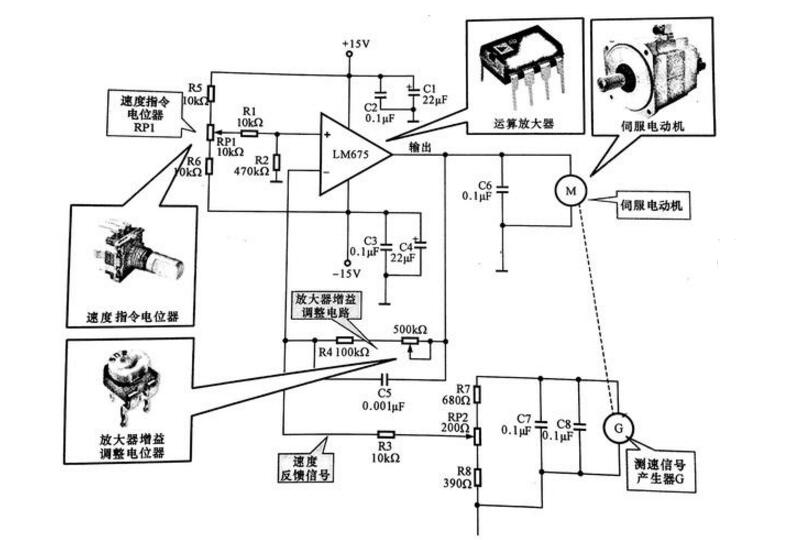
Esquema de controle do servo motor
Servomotor: Indicado pela letra M de servomotor, é a fonte de energia do sistema de acionamento. Amplificador operacional: denotado pelo nome do circuito, ou seja, LM675, é uma peça amplificadora no circuito de controle do servo que fornece a corrente de acionamento para o servo motor.
Potenciômetro de comando de velocidade RP1: Define a tensão de referência do amplificador operacional no circuito, ou seja, ajuste de velocidade. Potenciômetro de ajuste de ganho do amplificador RP2: Usado no circuito para ajustar o ganho do amplificador e o tamanho do sinal de feedback de velocidade, respectivamente.
Quando a carga do motor muda, a tensão realimentada para a entrada invertida do amplificador operacional também muda, ou seja, quando a carga do motor é aumentada, a velocidade diminui, e a tensão de saída do gerador de sinal de velocidade também diminui, de modo que a tensão na entrada invertida do amplificador operacional diminui, e a diferença entre esta tensão e a tensão de referência aumenta, e a tensão de saída do amplificador operacional aumenta. Por outro lado, quando a carga se torna menor e a velocidade do motor aumenta, a tensão de saída do gerador de sinal de medição de velocidade aumenta, a tensão de feedback adicionada à entrada invertida do amplificador operacional aumenta, a diferença entre esta tensão e a tensão de referência diminui, a tensão de saída do amplificador operacional diminui e a velocidade do motor diminui de acordo, de modo que a velocidade de rotação pode ser estabilizada automaticamente no valor definido.


